Projects
Robot Build 2024-2025
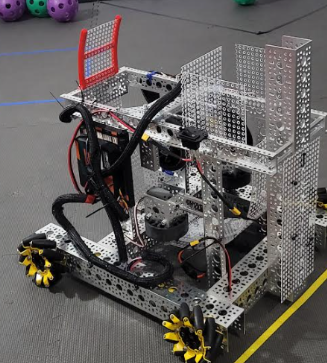
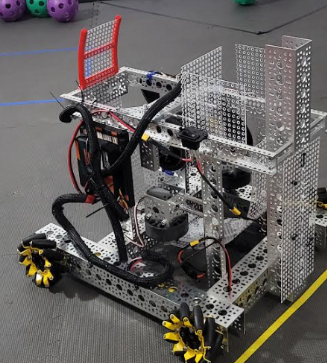
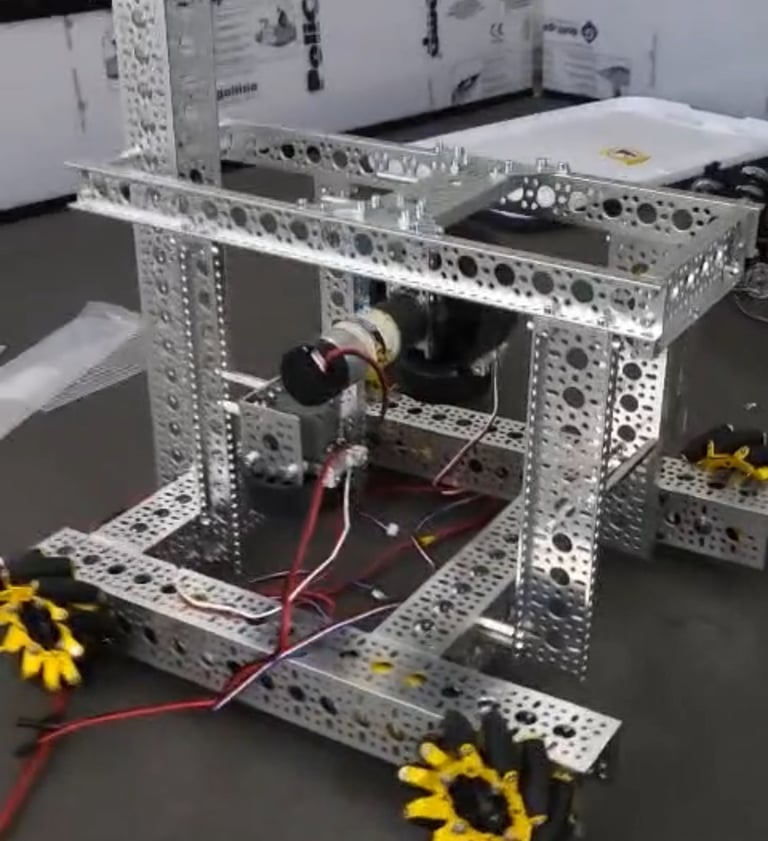
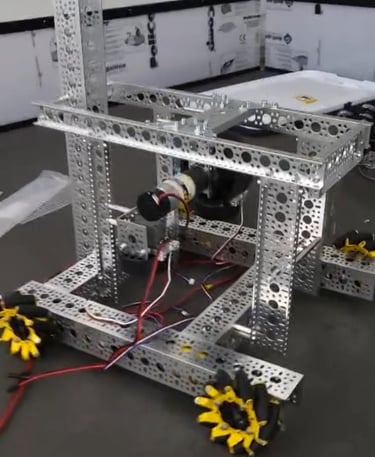
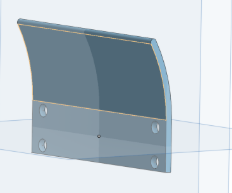
On the left, above, is our original bot for the 25-26 season and on the left is the modified version we finished with. Our bot uses a hopper in which the human player puts balls into the bot before we go to the goal and shoot. To shoot, we use a flywheel that spins and shoots the balls out. We made many improvements to this original, such as switching to Mecanum wheels for better movement. We score up against the goal using a ramp for improved accuracy. Without the ramp, the balls used for scoring would fly straight up and often miss the goal and go back into the robot.
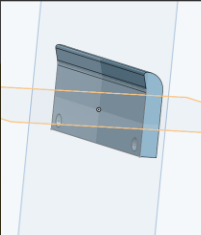
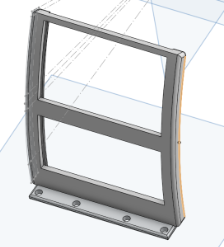
Our original ramp design, on the top right of the text, was not sturdy enough and so the balls still went straight up, not solving our problem. Our next design, below the original had more holes so it could be mounted to the bot easier but, it was still to flimsy and faced similar problems to the original design. The balls wouldn't go back into the bot anymore but, they often wouldn't make it into the goal. Our final, design on the bottom right of the text, was a slot system we could put over the polycarbonate. This proved to be a great choice and our accuracy and performance increased greatly.


Programming 2024-2025
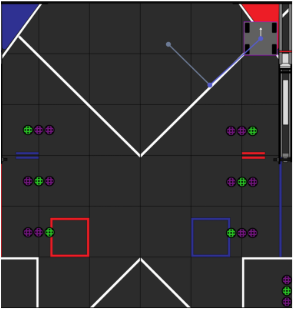
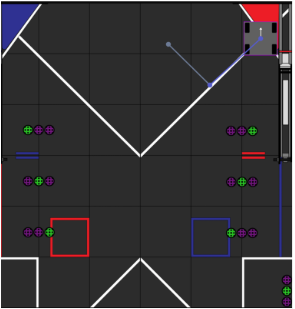
These two images above show our paths for our autonomous. On the left side, we have the path for starting in the far from the goal and the right shows the path for close to the goal. We had both so we could be more flexible for and let our teammates choose whichever they were better at. We simply reversed the paths for scoring on the blue goal. A distance sensor was used to make sure we were properly spaced from the goal so our bot would always make all 3 balls into the goal.
We coded a sensor to tell our driver when our bot was ready to shoot flashing green when ready and red when the flywheel still needed to speed up. We implemented a macro to shoot all 2 of our balls in one go instead of having to press the buttons 3 times. We also used a smart state machine because our each of the conditions needed for the ball to fire properly needed to be met sequentially and quickly so we used this to stop the code from running if the robot wasn't ready and to reduce the downtime for our shots.

Contact Us
Maximumoverdriveftc@gmail.com
© 2026. All rights reserved.
Socials
Based in Fremont, California